1995年毕业于清华大学电子工程系,获工学学士学位。2000年毕业于清华大学电子工程系,获工学博士学位。同年在清华大学电子工程系任教,现任清华大学集成电路学院集成电路设计研究所所长。研究方向包括数模混合信号集成电路设计、数字信号处理、高速串行通信、智能机器人等。
作为课题负责人先后承担了国家重大专项“高速串行接口IP核研发与应用”,863项目“移动智能终端大容量存储关键技术研究”,“超高频(UHF)读写器芯片的研发与产业化”,973项目子课题“可植入无线微电流刺激器的设计与研究”,自然科学基金项目“应用于下一代100Gbps以太网的高速串行接口PHY关键技术研究”,“空间飞行器中实时图像压缩的若干问题研究”,北京市科技计划项目“超小尺寸超薄RFID标签技术研究”,清华大学基础研究基金“植入式电子耳蜗技术的研究与开发”。作为子课题负责人曾经参加自然科学基金“面向精细操作的高分辨率多模态智能传感装置研制”,国家重点基础研究发展规划973项目“SOC的若干关键技术”,863项目“符合ISO 18000-6 Type B/C标准的(UHF)标签芯片的研发和产业化”等课题的科研工作。获国家科学技术进步奖二等奖,中国电子学会科学技术奖一等奖,中国电力科学技术进步奖二等奖等奖励。
讲授研究生专业课“结构化集成电路设计”,“数字集成系统设计”,“IC设计与方法”,本科生课程“集成电路设计与实践”、“SOPC技术与应用”,“智能机器人设计与实践”。大规模网络开放课程(MOOC)“IC设计与方法”被评为“国家精品在线开放课程”。发表学术论文100多篇,著作5本,申请专利60多项。
自2019年起担任国际自主智能机器人大赛技术委员会主任,负责赛事规则、赛项安排、技术路线等技术方面的工作。
科研方向
1. 新一代机器人自主运动导航算法及系统级方案
智能机器人运动系统可分为感知层、决策层、运动层三个层级,实验室分别展开研究,并对异构平台加速方案进行研究。
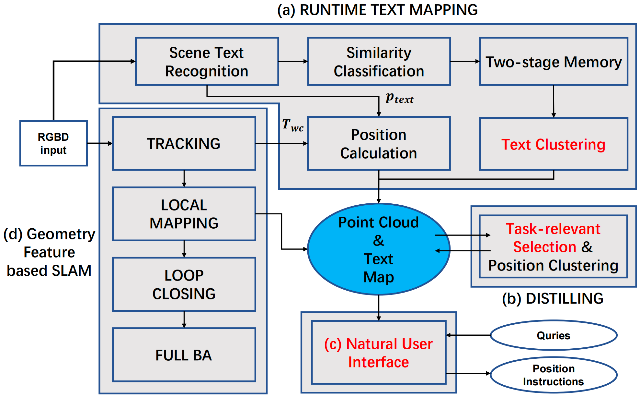
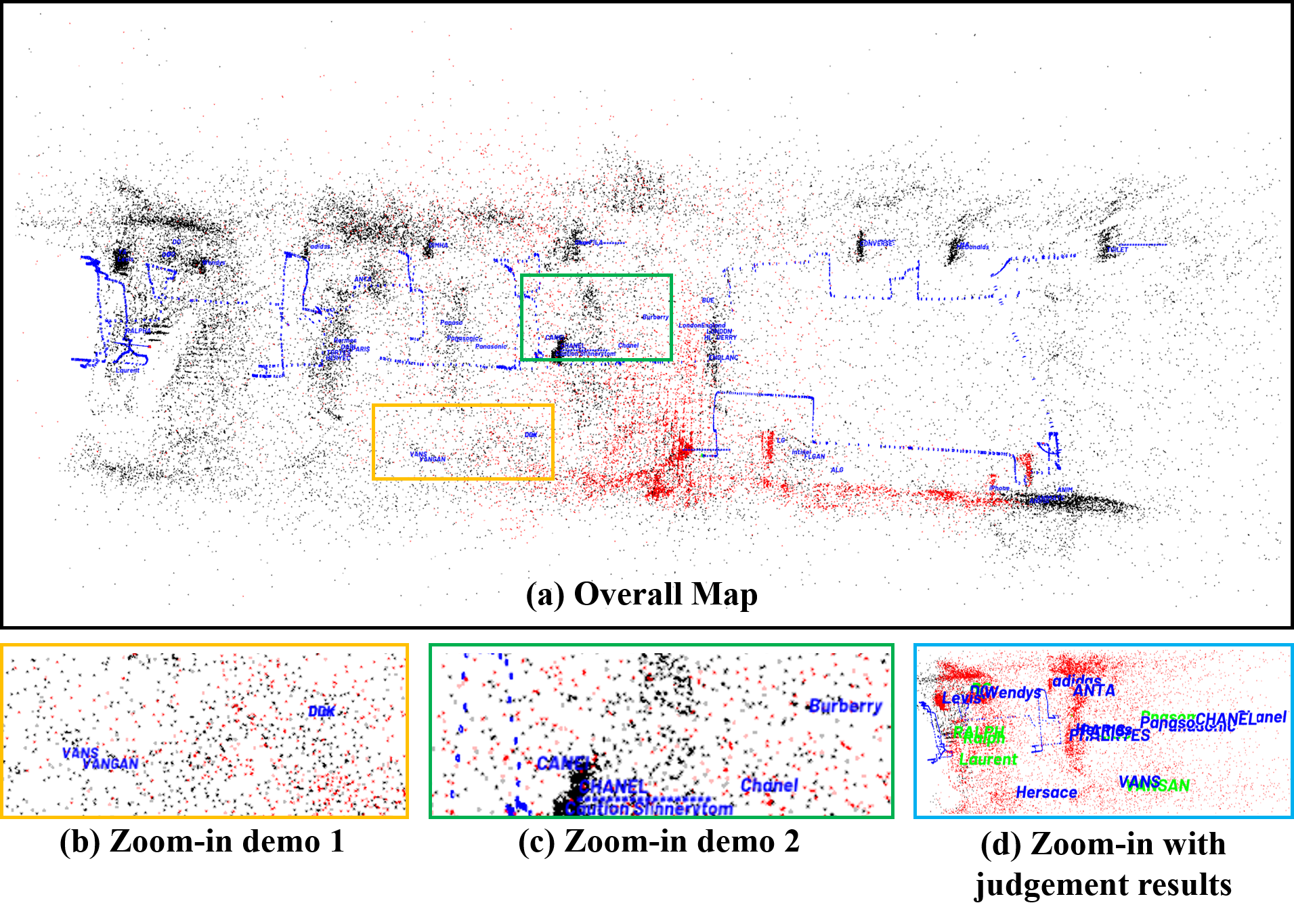
感知层:提出Language-Perceptive RGB-D SLAM(LP-SLAM),将大模型引入SLAM系统中,赋予机器人处理、理解场景中文字信息的能力。LP-SLAM以主流SLAM系统为基础,在建图过程中实时提取场景中的文本信息,并使用大语言模型对信息进行任务相关性筛选,对于判定为相关的文本,计算其在场景中的位置,并添加至三维地图中。为解决文本提取产生的误差,本项目提出了文本纠错链(Text Error Correction Chain, TECC),包括相似度聚类、两级记忆策略、以及基于大语言模型的文本聚类算法。建图完成后,LP-SLAM根据所建立的地图,使用大语言模型提供自然语言人机交互接口,可以根据用户需求,判断需要前往的场所,以及对应的地图坐标。
决策层:基于强化学习的局部导航策略。四足机器人的灵活运动受限于感知和本体的处理能力。如何在密集复杂的环境下实现灵活避障,是当前机器人导航领域的难点问题。本课题从强化学习第一性原理出发,研究如何充分发挥“探索-利用”的效率,设计了高效的解决方案。在一张4090显卡上,仅需数小时即可完成高难度的导航任务,并展示出足够的泛化能力。仅依靠机载雷达感知,达到最先进的避障水平。


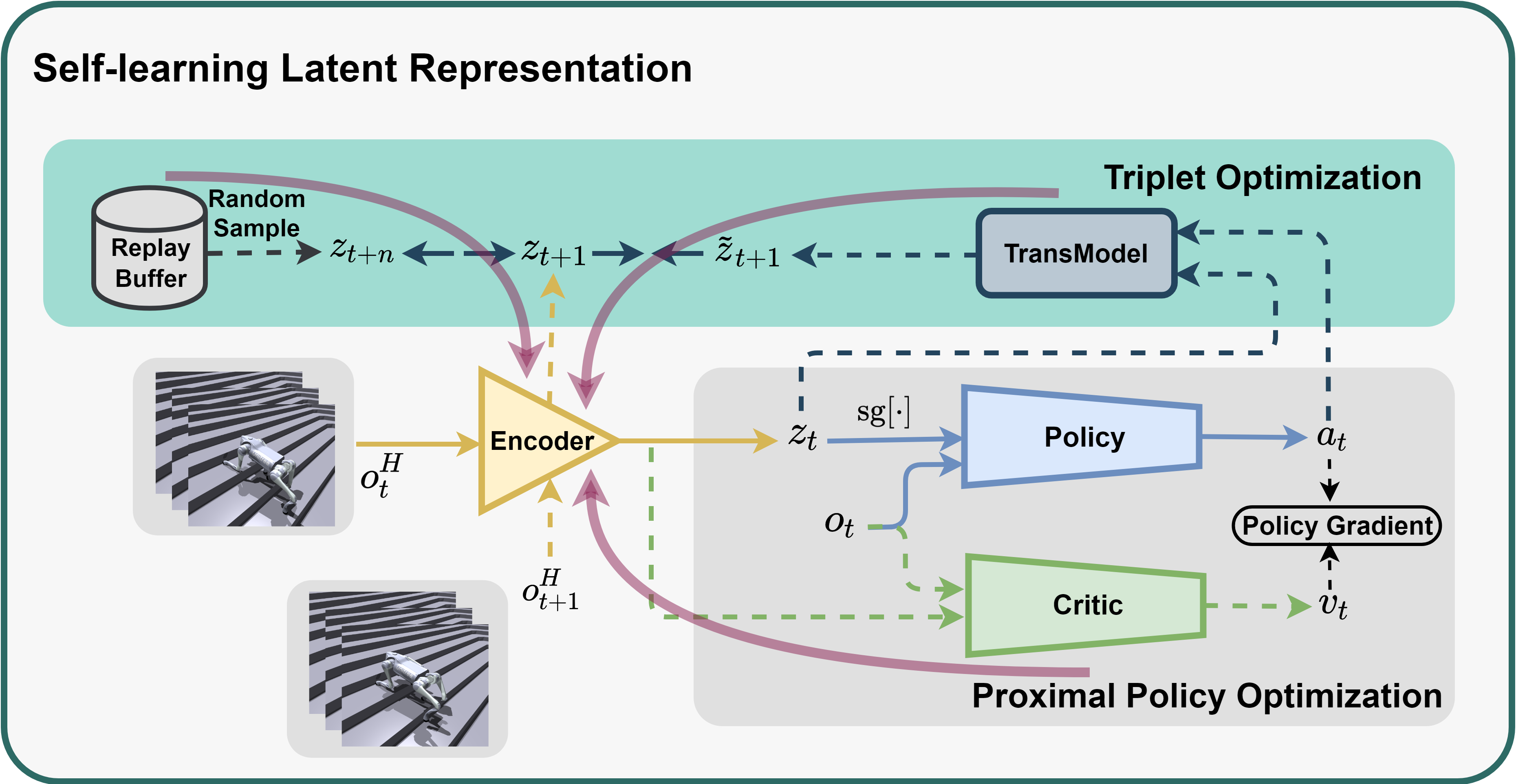
运动层:基于强化学习的运动控制方案。关注基于自监督学习的潜在特征优化,以及基于强化学习的鲁棒运动控制,致力于设计简洁、高效的训练框架。本课题提出了一种自学习潜在表示(SLR)方法,该方法无需特权信息,仅凭有限的本体感知数据就超越了先前的方法,能够通过各种复杂地形,实现SOTA级别的运动性能,展示出未来应用的巨大潜力。


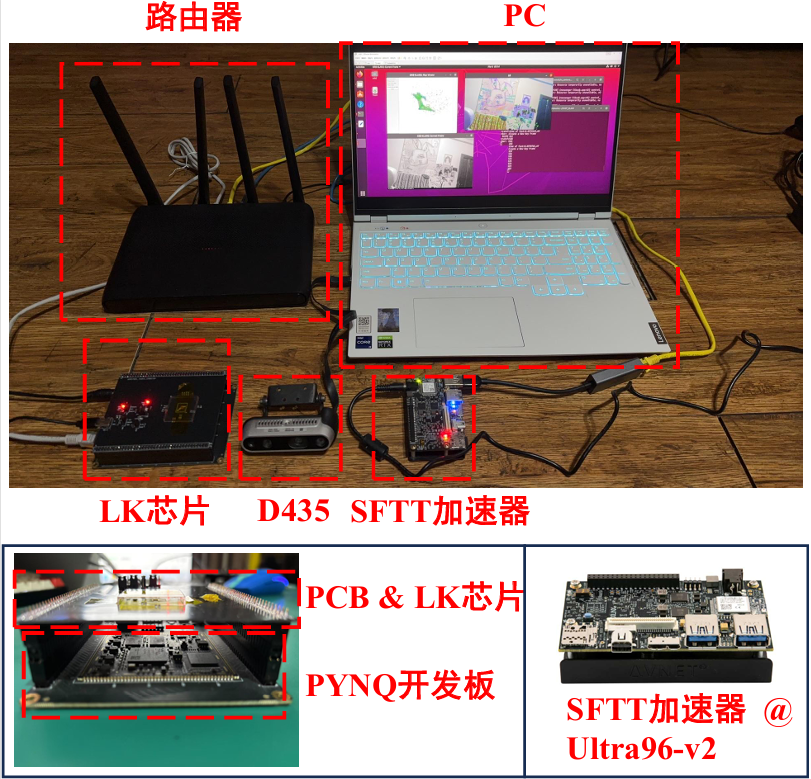
硬件层:机器人导航系统在异构平台的软硬件协同设计。本工作旨在研究SLAM 加速系统的 SoC 实现,为此本工作设计了适用于 SLAM SoC 的算法框架,并完成软件、硬件部分的划分,同时为提高扩展性,充分发挥异构计算系统的潜力,本工作设计了 ROPY-SLAM 解决方案。基于以上技术,本工作针对特征点提取算法与 LK 光流法设计硬件加速器。其中,对特征点提取算法,我们提出了面向SLAM 系统的 SFTT 特征点提取算法;对 LK 光流法,我们对算法内部逻辑进行拆解重组。两个算法的硬件加速器均达到了当前最优的水平。进一步地,本工作基于 ROPY-SLAM 框架,进行了整体系统验证,包括运行于 FPGA 平台的 SFTT 加速器、运行于 ASIC 平台的 LK 加速器(TSMC 28nm HPC+),以及运行在 PC 端的其他部分,并接收来自 RGB-D 摄像头的输入。

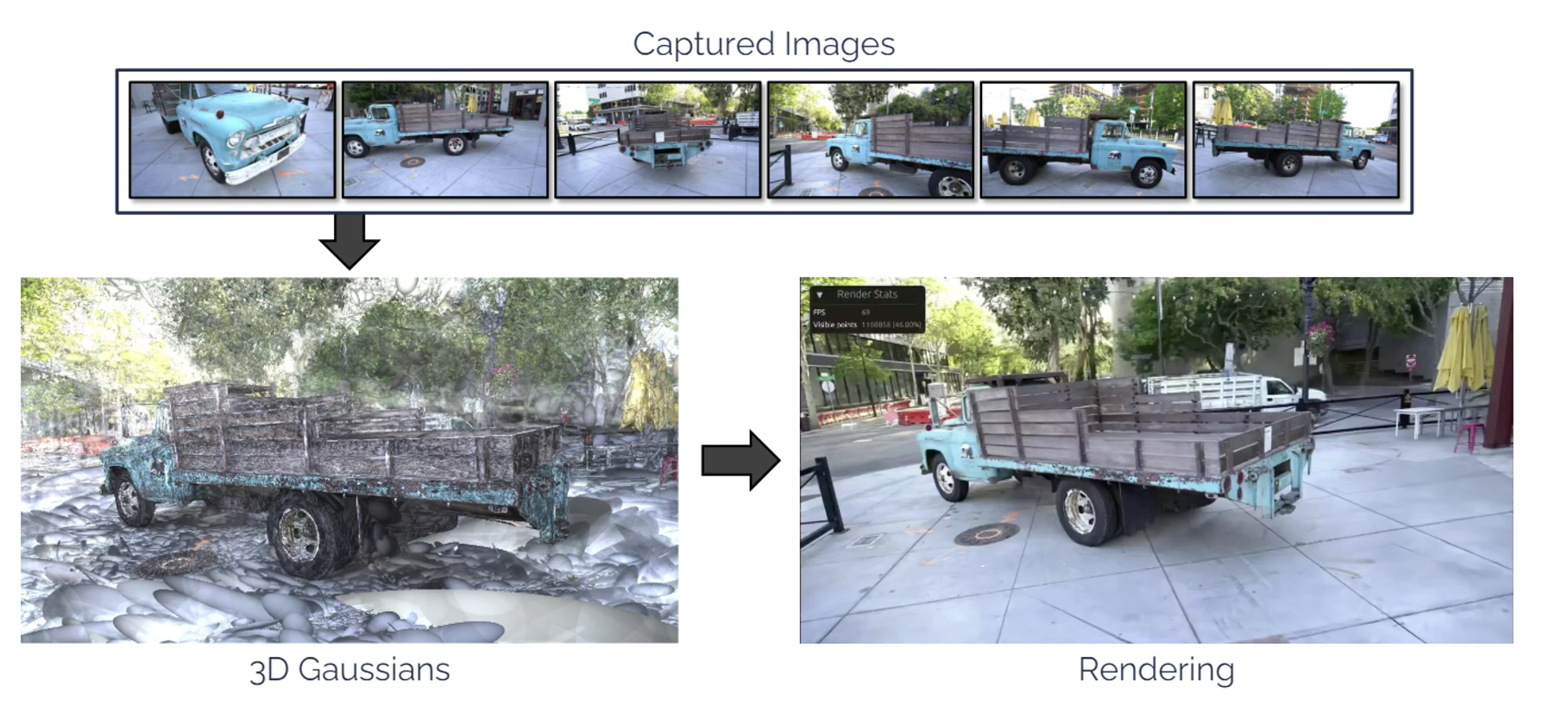
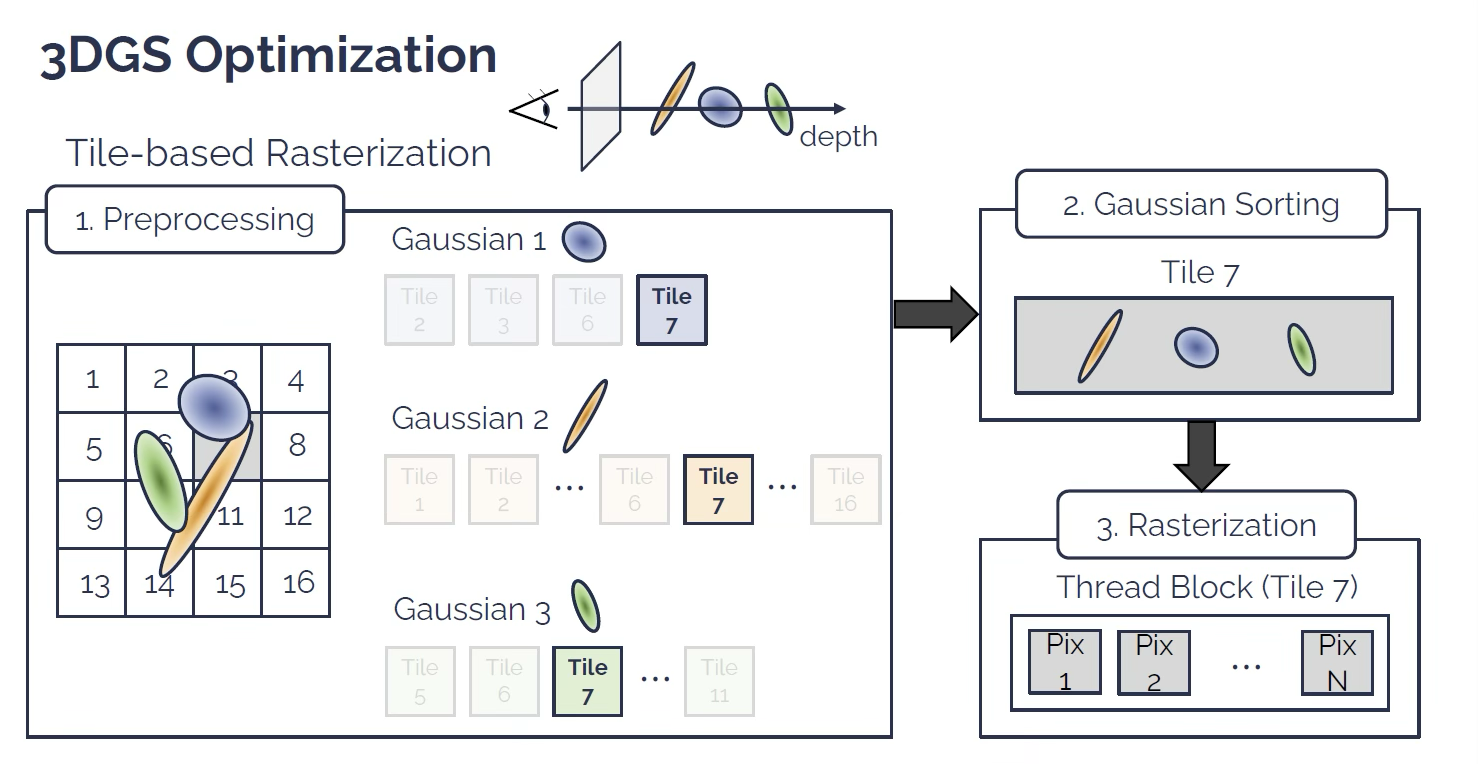
2. 3D高斯溅射加速电路研究
3D高斯喷溅(3D Gaussian Splatting)是一项场景重建和高速渲染技术。虽然3D高斯喷溅提供了卓越的渲染性能,图像质量优于以往的隐式表示方法,但实现重要领域的实时渲染,如虚拟现实和移动计算,仍然具有挑战性。鉴于移动平台的功耗预算的限制,移动GPU不太可能变得像桌面或服务器级GPU那样强大,这限制了我们将该技术的好处扩展到更广泛的计算领域。本课题通过多层次硬件架构和存储优化策略来应对边缘渲染计算的挑战。我们使用AMD Zynq™ UltraScale+™ MPSoC ZCU104 Evaluation Kit对所提出的硬件架构进行了实验,结果表明在950*545的渲染分辨率下,所提出的加速器最高渲染帧率能达到40FPS,相较于NVIDIA Jetson AGX GPU,实现了超过80倍的能源节省。
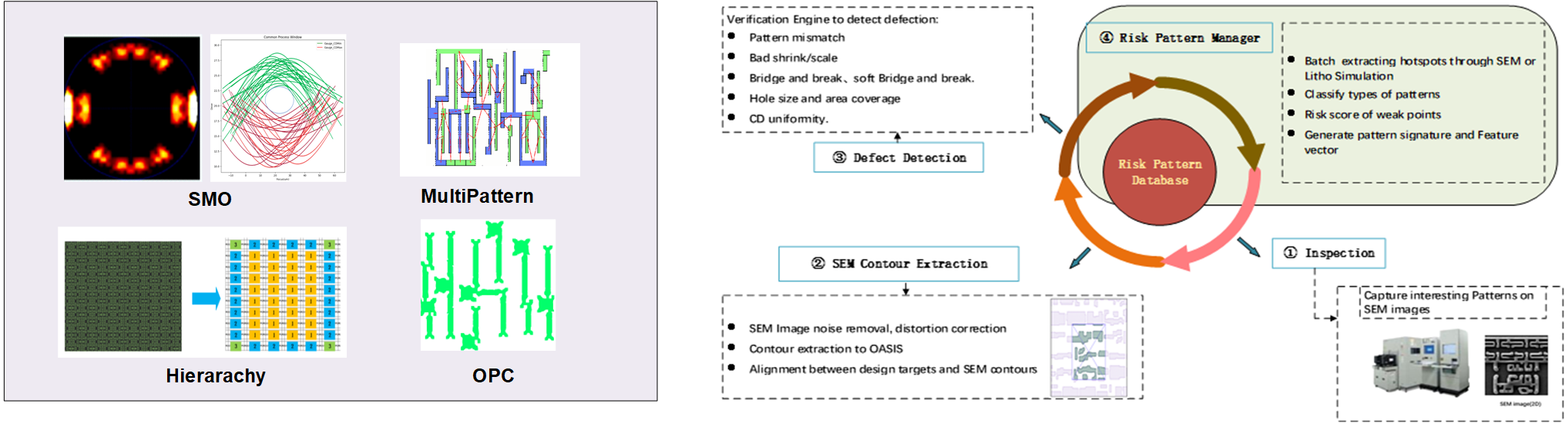
3. 计算光刻
计算光刻是基于光学成像和光刻刻蚀工艺模型,利用计算机模拟和优化光刻过程,预测和改善光刻过程中的成像效果,补偿因衍射或光学、抗蚀剂和蚀刻邻近效应而导致的各种图像误差,从而提高芯片制造的良率和性能。目前主要研究方向为计算光刻软件算法开发和工程验证,包括光学邻近修正(OPC)、光源-掩模优化(SMO)、多重曝光版图拆分(MultiPattern)、基于SEM的量测与缺陷检测等技术的研究。
研究适用于光学邻近修正系统的版图层次化分析系统,利用版图单元拓扑关系、图形模式匹配、阵列周期性等重建版图数据,加速全芯片光学邻近修正处理,提高光刻制造的一致性。研究光刻计算仿真与版图处理的分布式计算框架,任务分解模式、计算边界等问题。
支持28nm 以下节点业界主流多重曝光技术方案,包括LELE,LELELE, SADP, SAQP等;支持Cut掩膜的优化,光刻友好性的图形打断方式,设计可配置的版图拆分接口,解决单层大规模(百亿级)图形数据有限时间内求解问题和拆分热点问题。
采用机器学习等图像处理技术,批量处理晶圆制造过程中采集的SEM图像,提取图形轮廓,采用量测、D2DB比对等方式进行缺陷检测。通过数据挖掘算法和趋势分析,形成热点数据库,统计各种设计图形模式的风险度,指导芯片版图设计与制造相关配方(Recipe)的开发,从而改进芯片制造良率。
研究像素化光源优化模型加速计算方法,反演光刻掩膜优化算法、光源掩膜协同优化数据处理流程以及不同评价函数、惩罚函数、掩膜3D模型等因素对光刻工艺窗口的提升。
4. 机器人大赛
将科研成果应用于机器人大赛中,以赛代训,验证科研成果,探索新研究内容。主要奖项包括:
2017 全国集成电路创新创业大赛,一等奖
2019 国际自主智能机器人大赛 Running-Robot,标准赛,特等奖
2021 中国机器人与人工智能大赛 CRAIC,足球虚拟赛,国赛一等奖
2021 人工智能创新应用大赛 AIAC,AI机器人专题赛,总决赛一等奖
2022 全国人工智能创新应用大赛 CRAIC, ROBAN中型机器人北京赛区一等奖
2022 国际自主智能机器人大赛 Running-Robot,夺宝赛一等奖
2023 全国人工智能创新应用大赛 CRAIC,四足仿生机器人决赛(中型组)一等奖
2024 全国人工智能创新应用大赛 CRAIC,四足急速物流全国总决赛一等奖


近年学术成果
Chen, Shiyi; Wan, Zeyu; Yan, Shiyang; Zhang, Chun; Zhang, Weiyi; Li, Qiang; Zhang, Jianwei; Fasih Ud Din Farrukh. SLR: Learning Quadruped Locomotion without Privileged Information[C]. Proceedings of The 8th Conference on Robot Learning (2025).
Zhang, Weiyi; Guo, Yushi; Niu, Liting; Li, Peijun; Wan, Zeyu; Shao, Fei; Nian, Cheng; Fasih Ud Din Farrukh; Zhang, Debing; Zhang, Chun; Li, Qiang; Zhang, Jianwei. LP-SLAM: Language-Perceptive RGB-D SLAM Framework Exploiting Large Language Model[J]. Complex & Intelligent Systems, 2024,vol.10,No. 4,p5391-5409.
Cheng Nian; Weiyi Zhang; Fasih Ud Din Farrukh; Liting Niu; Dapeng Jiang; Fei Chen; Chun Zhang; A 77.79 GOPs/W Retentive Network FPGA Inference Accelerator with Optimized Workload, IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society, Chicago, IL, USA, 2024-11-3-6
Zhang, Weiyi; Niu, Liting; Zhang, Debing; Wang, Guangqi; Fasih Ud Din Farrukh, Din; Zhang, Chun. HW-ADAM: FPGA-Based Accelerator for Adaptive Moment Estimation[J]. Electronics 2023, 12, 263. https://doi.org/10.3390/electronics12020263.
Niu, Liting, Zhang, Weiyi, Nian, Cheng, Shao, Fei, Fasih Ud Din Farrukh, Zhang, Chun. Hardware-Software Co-Design of Matrix-Solving for Non-Linear Optimization in SLAM Systems[C]. IECON 2023-49th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2023: 1-8.
Nian, Cheng; Zhang, Weiyi; Niu, Liting; Wang, Yiyang; Ding, Chaoyang; Shao, Fei; Zhang, Chun. Energy-Efficient Pose-Estimation FPGA-Accelerator for Real-Time Mobile V-SLAM Robot[C]. 2023 IEEE 66th International Midwest Symposium on Circuits and Systems (MWSCAS). IEEE, 2023: 566-570.
Ding, Chaoyang; Zhang, Weiyi; Nian, Cheng; Wang, Yiyang; Fasih Ud Din Farrukh; Chun Zhang. A 325 FPS Corner-Detection Accelerator with Hardware-Oriented Optimization[C]. 2023 IEEE International Conference on Integrated Circuits, Technologies and Applications (ICTA). IEEE, 2023: 154-155.
Wu, Yichun; Gu, Qiuyi; Yu, Jincheng; Ge, Guangjun; Wang, Jian; Liao, Qingmin; Zhang, Chun; Wang, Yu. MR-GMMExplore: Multi-Robot Exploration System in Unknown Environments based on Gaussian Mixture Model[C]. 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2022: 1198-1203.
Fasih Ud Din Farrukh; Weiyi Zhang; Chun Zhang; Zhihua Wang; Hanjun Jiang; FPSNET: An Architecture for Neural-Network-Based Feature Point Extraction for SLAM[J]. MDPI Electronics 2022, 11, 4168.
Zhang, Weiyi; Jiang, Yancao; Fasih Ud Din Farrukh; Zhang, Chun; Zhang Debing; Wang Guangqi. 2022. LORM: a novel reinforcement learning framework for biped gait control[J]. PeerJ Computer Science 8 (2022):e927 https://doi.org/10.7717/peerj-cs.927
Weiyi Zhang; Liting Niu; Chaoyang Ding; Yiyang Wang; Fasih Ud Din Farrukh; Chun Zhang; ROPY-SLAM: a Heterogeneous CPUFPGA System for Simultaneous Localization and Mapping[C]. 2022 IEEE International Conference on Integrated Circuits, Technologies and Applications (ICTA). IEEE, 2022:125-126.
 清华主页
清华主页







